Author: Chris Suberlak (@suberlak)
Software Versions:
ts_wep: v2.5.4
lsst_distrib: w_2022_32
Introduction¶
The Active Optics System wavefront estimation pipeline is at the core of the system helping to maintain mirror and camera alignment of the Large Synoptic Survey Telescope (LSST). The misalignments caused by gravity and thermal gradients are largely corrected for with the Look-Up Table. In addition, the AOS system uses defocal images to estimate the wavefront curvature, and further correct the mirror shape, adjusting the 50 degrees of freedom distributed amongst bending modes of M1M3, M2, and rigid body positions of M2 and the camera. Due to annular aperture, the out-of-focus point sources appear as donuts. The AOS system utilizes four corner wavefront sensors, each divided in two parts - one extrafocal, and the other intrafocal. Thus each corner sensor provides a simultanous image of defocal sources on both sides of focus. One intrafocal and one extrafocal donuts are paired up. Each pair of donuts is used to provide an estimate of the wavefront shape in terms of the Zernike polynomial coefficients. An entire process is described in eg. Xin+2015. This document serves as an in-depth overview of each step taken inside the algorithm to to get from images to Zernikes.
To test and improve the performance of the AOS loop, the telescope operation is simulated with ts_phosim (CloseLoopTask). Resulting defocal images are analyzed with ts_wep (Wavefront Estimation Pipeline), and corrections are applied to the corresponding telescope subsystems with ts_ofc (Optical Feedback Control).
The curvature sensing algorithm is part of the ts_wep package. Given a pair of defocal images, ts_wep detects donuts, and creates postage stamp image cutouts around each donut. The immediate output of ts_wep per donut pair is a raw estimate of the wavefront error called outputZernikesRaw. This information is combined (per sensor) to make
outputZernikesAvg. CloseLoopTask passes the sensor-averaged wavefront error estimate to ts_ofc. The corrections are then applied to the simulated mirror system (M1M2, M3). With improved mirror shape, another exposure is simulated. This process is repeated several times. The simulation of several subsequent exposures has converged if the image quality
metrics (such as Full Width Half-Maximum, FWHM or Point Source Sensitivity Normalized, PSSN) improve from the initial perturbations, and remain stable.
Below we explore parts of Algorithm.py, that lead to the calculation of outputZernikesRaw. Steps inside the Algorithm follow a cycle of iterative improvements to the wavefront estimation, but the term iteration pertains there to a different process than in the CloseLoopTask. Indeed, per single iteration of CloseLoopTask, there are usually 14 iterations of the outer loop of the Algorithm to arrive at the wavefront estimate. In this note we use a simulation of corner sensor
images. An accompanying presentation is also available.
Imports¶
[1]:
import yaml
import os
import numpy as np
from scipy.ndimage import rotate
import matplotlib.pyplot as plt
import matplotlib.lines as mlines
import matplotlib as mpl
from matplotlib import rcParams
from lsst.ts.wep.cwfs.Instrument import Instrument
from lsst.ts.wep.cwfs.Algorithm import Algorithm
from lsst.ts.wep.cwfs.CompensableImage import CompensableImage
from lsst.ts.wep.Utility import (
getConfigDir,
DonutTemplateType,
DefocalType,
CamType,
getCamType,
getDefocalDisInMm,
CentroidFindType
)
from lsst.ts.wep.ParamReader import ParamReader
from lsst.ts.wep.cwfs.Tool import (
padArray,
extractArray,
ZernikeAnnularGrad,
ZernikeAnnularJacobian,
)
from lsst.ts.wep.task.DonutStamps import DonutStamp, DonutStamps
from lsst.ts.wep.task.EstimateZernikesCwfsTask import (
EstimateZernikesCwfsTask,
EstimateZernikesCwfsTaskConfig,
)
from lsst.daf import butler as dafButler
import lsst.afw.cameraGeom as cameraGeom
from lsst.afw.cameraGeom import FOCAL_PLANE, PIXELS, FIELD_ANGLE
from lsst.geom import Point2D
from astropy.visualization import ZScaleInterval
from scipy.ndimage import generate_binary_structure, iterate_structure
from scipy.ndimage import binary_dilation, binary_erosion
from scipy.interpolate import RectBivariateSpline
from scipy.signal import correlate
# Note: algorithm_functions are a collection of
# python scripts that make this tech note
# more readable; to execute them in the notebook
# it is assumed that they have been imported by eg.
# cloning the github repo containing
# this notebook, and adding that path_to_notebook with
# import sys
# sys.path.append(path_to_notebook)
# if the notebook is run from the same directory
# this step is not needed
import algoritm_functions as func
INFO:numexpr.utils:Note: detected 128 virtual cores but NumExpr set to maximum of 64, check "NUMEXPR_MAX_THREADS" environment variable.
INFO:numexpr.utils:Note: NumExpr detected 128 cores but "NUMEXPR_MAX_THREADS" not set, so enforcing safe limit of 8.
INFO:numexpr.utils:NumExpr defaulting to 8 threads.
[2]:
rcParams['ytick.labelsize'] = 15
rcParams['xtick.labelsize'] = 15
rcParams['axes.labelsize'] = 20
rcParams['axes.linewidth'] = 2
rcParams['font.size'] = 15
rcParams['axes.titlesize'] = 18
Preparing input data¶
We read in the images as well as donut catalogs by quering for the data products of a previous run of CloseLoopTask.
[3]:
mag = 15
repo_dir = f'/sdf/data/rubin/u/scichris/WORK/AOS/DM-36218/wfs_grid_{mag}/phosimData/'
instrument = 'LSSTCam'
collection = 'ts_phosim_9006000'
sensor='R04'
donutStampsExtra, extraFocalCatalog = func.get_butler_stamps(repo_dir,instrument=instrument,
iterN=0, detector=f"{sensor}_SW0",
dataset_type = 'donutStampsExtra',
collection=collection)
donutStampsIntra, intraFocalCatalog = func.get_butler_stamps(repo_dir,instrument=instrument,
iterN=0, detector=f"{sensor}_SW1",
dataset_type = 'donutStampsIntra',
collection=collection)
extraImage = func.get_butler_image(repo_dir,instrument=instrument,
iterN=0, detector=f"{sensor}_SW0",
collection=collection)
Here we follow the steps of EstimateZernikesBase.estimateZernikes: configuring Algorithm and Instrument classes, as well as initializing the CompensableImage class needed used in the algorithm:
[4]:
# get the pixel scale from exposure to convert from pixels to arcsec to degrees
pixelScale = extraImage.getWcs().getPixelScale().asArcseconds()
configDir = getConfigDir()
instDir = os.path.join(configDir, "cwfs", "instData")
algoDir = os.path.join(configDir, "cwfs", "algo")
# inside wfEsti = WfEstimator(instDir, algoDir)
# this is part of the init
inst = Instrument()
algo = Algorithm(algoDir)
# inside estimateZernikes()
instName='lsst'
camType = getCamType(instName)
defocalDisInMm = getDefocalDisInMm(instName)
# inside wfEsti.config
opticalModel = 'offAxis'
sizeInPix = 160 # aka donutStamps
inst.configFromFile(sizeInPix, camType)
# choose the solver for the algorithm
solver = 'exp' # by default
debugLevel = 0 # 1 to 3
algo.config(solver, inst, debugLevel=debugLevel)
centroidFindType = CentroidFindType.RandomWalk
imgIntra = CompensableImage(centroidFindType=centroidFindType)
imgExtra = CompensableImage(centroidFindType=centroidFindType)
# select a donut pair in that corner
i=1
donutExtra = donutStampsExtra[i]
j=4
donutIntra = donutStampsIntra[j]
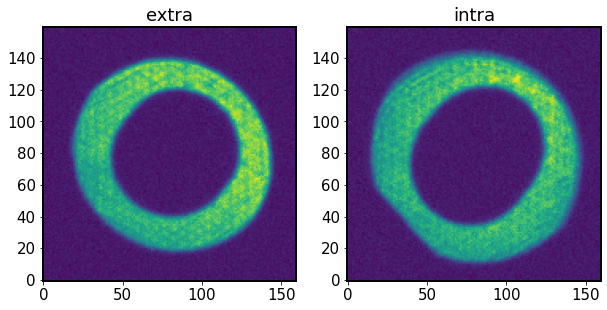
Show the two donut images
[5]:
fig,ax = plt.subplots(1,2,figsize=(10,5))
ax[0].imshow(donutExtra.stamp_im.image.array, origin='lower')
ax[0].set_title('extra')
ax[1].imshow(donutIntra.stamp_im.image.array, origin='lower')
ax[1].set_title('intra')
[5]:
Text(0.5, 1.0, 'intra')
[6]:
# Inside EstimateZernikesBase
# Transpose field XY because CompensableImages below are transposed
# so this gets the correct mask orientation in Algorithm.py
fieldXYExtra = donutExtra.calcFieldXY()[::-1]
fieldXYIntra = donutIntra.calcFieldXY()[::-1]
# same camera for both donuts
camera = donutExtra.getCamera()
detectorExtra = camera.get(donutExtra.detector_name)
detectorIntra = camera.get(donutIntra.detector_name)
# Rotate any sensors that are not lined up with the focal plane.
# Mostly just for the corner wavefront sensors. The negative sign
# creates the correct rotation based upon closed loop tests
# with R04 and R40 corner sensors.
eulerZExtra = -detectorExtra.getOrientation().getYaw().asDegrees()
eulerZIntra = -detectorIntra.getOrientation().getYaw().asDegrees()
# now inside `wfEsti.setImg` method,
# which inherits from `CompensableImage`
imgExtra.setImg(fieldXYExtra,
DefocalType.Extra,
image=rotate(donutExtra.stamp_im.getImage().getArray(), eulerZExtra).T)
imgIntra.setImg(fieldXYIntra,
DefocalType.Intra,
image=rotate(donutIntra.stamp_im.getImage().getArray(), eulerZIntra).T)
Algorithm: single iteration¶
Now that all the data is setup as a compensableImage and both Algorithm and Instrument classes are initiated, we are able to make the direct call to the runIt method that takes two defocal images to perform the wavefront estimation:
tol = 1e-3 # explicitly set the tolerance level ( this is default )
algo.runIt(imgIntra, imgExtra, opticalModel, tol=tol)
Initialization¶
[7]:
# rename to just like it is in Algorithm.py
I1 = imgIntra
I2 = imgExtra
model = opticalModel
tol = 1e-3
Dig inside Algorithm.py. We call runIt method which contains multiple calls to _singleItr, which includes the outer and inner loops. From Algorithm.runIt docstring:
The inner loop is to solve the Poisson’s equation. The outer loop is to compensate the intra- and extra-focal images to mitigate the calculation of wavefront (e.g. S = -1/(delta Z) * (I1 - I2)/ (I1 + I2)).”
The signature for runIt is :
def runIt(self, I1, I2, model, tol=1e-3):
# To have the iteration time initiated from global variable is to
# distinguish the manually and automatically iteration processes.
itr = self.currentItr
while itr <= self.getNumOfOuterItr():
stopItr = self._singleItr(I1, I2, model, tol)
# Stop the iteration of outer loop if converged
if stopItr:
break
itr += 1
The getNumOfOuterItr() method shows us the number of outer iterations to perform:
[8]:
algo.getNumOfOuterItr()
[8]:
14
This number is set in policy/algo/exp.yaml file. The other possible settings become apparent upon inspection of the contents of the yaml file:
# Algorithm parameters to solve the transport of intensity equation (TIE)
# The way to solve the Poisson equation
# fft: Fast Fourier transform method per Roddier & Roddier 1993
# exp: Series expansion method per Guruyev & Nugent 1996
poissonSolver: exp
# Maximum number of Zernike polynomials supported
numOfZernikes: 22
# Obscuration ratio used in Zernike polynomials
# 0: Standard filled
# 1: Annular as defined by system in instParam.yaml
# others (0 < x < 1): Use as the obscuration ratio
obsOfZernikes: 1
# Number of outer loop iteration when solving TIE
numOfOuterItr: 14
# Gain value used in the outer loop iteration
feedbackGain: 0.6
# Number of polynomial order supported in off-axis correction
offAxisPolyOrder: 10
# Method to compensate the wavefront by wavefront error
# zer: Derivatives and Jacobians calculated from Zernike polynomials
# opd: Derivitives and Jacobians calculated from wavefront map
compensatorMode: zer
# Compensate the image based on the Zk from the lower terms first according to
# the sequence defined here
# Sets compensated zernike order vs iteration
compSequence: [4, 4, 6, 6, 13, 13, 13, 13, 22, 22, 22, 22, 22, 22]
# Defines how far the computation mask extends beyond the pupil mask and, in
# fft algorithm, it is also the width of Neuman boundary where the derivative
# of the wavefront is set to zero
boundaryThickness: 8
The outer loop uses the compensated sequence because in each iteration of the outer loop we fit Zernike polynomials up to a certain degree. Eg. in first outer loop we fit Zk1, Zk2, Zk3, Zk4 (i.e. Zk1-4), in the second outer loop Zk1-4, in the thire Zk1-6, etc. This is also stated in Xin2015, Sec 2A:
To decouple Zernike terms with the same azimuthal frequency, for example, between tip- tilt and astigmatisms, and defocus and spherical aberration, only a certain number of low-order Zernike terms are compensated at each outer iteration. After the algorithm has converged on low-order terms, higher-order terms are added to the compensated wavefront. The tests we show in Section 4 each include 14 outer iterations, with the highest Zernike index of 4, 4, 6, 6, 13, 13, 13, 13, 22, 22, 22, 22, 22, and 22, respectively.
[9]:
len(algo.getCompSequence())
[9]:
14
We start from iteration 0:
[10]:
itr = algo.currentItr
print(itr)
0
Then a _singleItr is called, which contains
def _singleItr(self, I1, I2, model, tol=1e-3):
[11]:
# initially the compensable image has not been calculated
type(I1.getImgInit())
[11]:
NoneType
model stands for optical model (explained below). It can be offAxis, onAxis, paraxial.
[12]:
model
[12]:
'offAxis'
[13]:
# Use the zonal mode ("zer")
compMode = algo.getCompensatorMode()
# Define the gain of feedbackGain
feedbackGain = algo.getFeedbackGain()
We get the compensation mode (“zer”) and feedback gain (0.6). As mentioned in Section 2A of Xin2015:
Our compensation algorithm has an oversampling parameter, which enables subpixel resolution for the mapping between the pupil and image planes. We can choose to improve the compensation performance by increasing the subpixel sampling, but at a cost of computation time. Due to the fact that the compensation is based on geometrical ray-tracing, we always compensate on the original defocused images. A feedback gain less than unity is used to prevent large oscillation in the final wavefront estimation, i.e., upon each outer iteration only part of the residual is compensated.
First iteration: computational and pupil masks¶
If this is the first iteration, we calculate the mask for each image:
[14]:
# Set the pre-condition
if algo.currentItr == 0:
# Check this is the first time of running iteration or not
if I1.getImgInit() is None or I2.getImgInit() is None:
# Check the image dimension
if I1.getImg().shape != I2.getImg().shape:
print(
"Error: The intra and extra image stamps need to be of same size."
)
# Calculate the pupil mask (binary matrix) and related
# parameters
boundaryT = algo.getBoundaryThickness()
I1.makeMask(algo._inst, model, boundaryT, 1)
I2.makeMask(algo._inst, model, boundaryT, 1)
Show the masks:
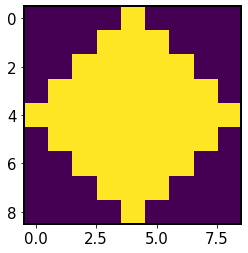
[15]:
fig,ax = plt.subplots(2,4,figsize=(12,6))
# top row: intra img and mask
for row, I, title in zip([0,1],
[I1,I2],
['intra','extra']
):
ax[row,0].imshow(I.getImg(), origin='lower') # image
ax[row,1].imshow(I.getNonPaddedMask(), origin='lower') # pupil
ax[row,2].imshow(I.getPaddedMask(), origin='lower') # comp
ax[row,3].imshow(I.getImg()*I.getNonPaddedMask(), origin='lower')
row=0
ax[row,0].set_title('image')
ax[row,1].set_title('non-padded \n(pupil) mask')
ax[row,2].set_title('padded \n(computational) \nmask')
ax[row,3].set_title('image*pupil mask')
for row in [0,1]:
for col in [1,2,3]:
ax[row,col].set(ylabel=None)
ax[row,col].tick_params(left=False)
ax[row,col].set(yticklabels=[])
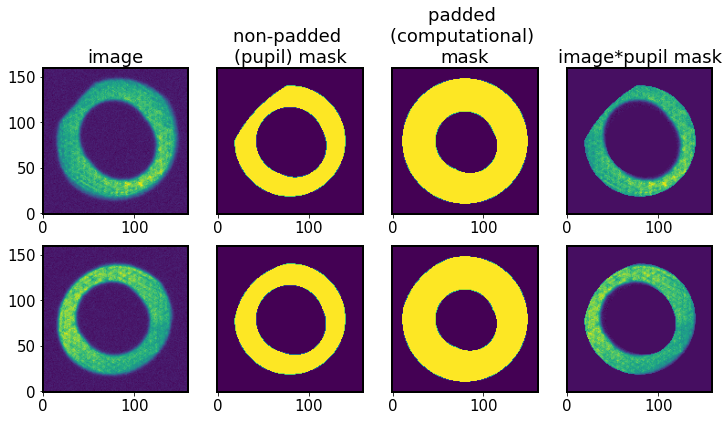
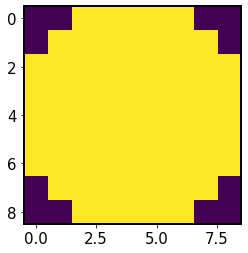
The computational (padded) mask does not lose vignetting, but it is harder to notice in the example above because the original image is not strongly vignetted. Examples of more vignetted computational masks are below, showing two computational masks, using the default boundary thickness (padding) of 8 pixels. One is at the field distance 1.6 degrees, and the other at 2.3 degrees. The right-hand-side panel exhibits the effects of vignetting in the upper-right corner.
[16]:
%matplotlib inline
comp1 = func.get_comp_image(boundaryT=7, optical_model="offAxis",
maskScalingFactorLocal =1, field_xy = (1.1,1.2),
donut_stamp_size = 160, inst_name='lsst')
comp2 = func.get_comp_image(boundaryT=7, optical_model="offAxis",
maskScalingFactorLocal =1, field_xy = (1.6,1.7),
donut_stamp_size = 160, inst_name='lsst')
fig,ax = plt.subplots(1,2,figsize=(10,5))
ax[0].imshow(comp1.mask_comp, origin='lower')
ax[0].set_title('cMask, boundaryT=7')
for i in range(2): ax[i].set_xlabel('x [px]')
ax[0].set_ylabel('y [px]')
ax[1].imshow(comp2.mask_comp, origin='lower')
ax[1].set_title('cMask, boundaryT=7')
[16]:
Text(0.5, 1.0, 'cMask, boundaryT=7')

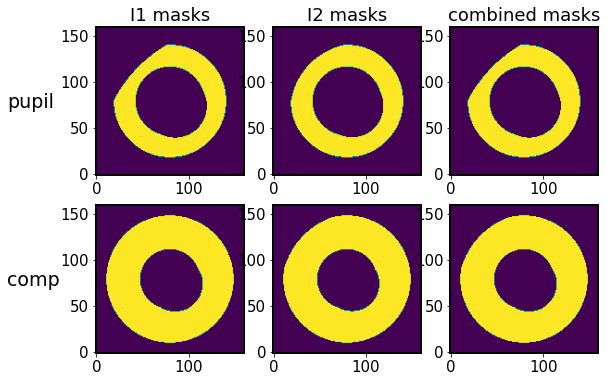
The subsequent call to
algo._makeMasterMask(I1, I2, algo.getPoissonSolverName())
creates a master mask, which is the overlap region:
# Get the overlap region of mask for intra- and extra-focal images.
# This is to avoid the anomalous signal due to difference in
# vignetting.
self.mask_comp = I1.getPaddedMask() * I2.getPaddedMask()
self.mask_pupil = I1.getNonPaddedMask() * I2.getNonPaddedMask()
This is described in Section 3D in Xin2015:
The vignetting pattern still varies by field. To avoid anomalous signal due to the difference in vignetting from entering the wavefront estimation results, we mask off the intrafocal and extrafocal images using a common pupil mask, which is the logical AND of the pupil masks at the intrafocal and extrafocal field positions.
[17]:
algo._makeMasterMask(I1, I2, algo.getPoissonSolverName())
Show the new masks:
[18]:
fig,ax = plt.subplots(2,3, figsize=(9,6))
row = 0
ax[row,0].imshow(I1.getNonPaddedMask(), origin='lower')
ax[row,1].imshow(I2.getNonPaddedMask(), origin='lower')
ax[row,2].imshow(algo.mask_pupil, origin='lower')
ax[row,0].set_title('I1 masks')
ax[row,1].set_title('I2 masks')
ax[row,2].set_title('combined masks')
row=1
ax[row,0].imshow(I1.getPaddedMask(), origin='lower')
ax[row,1].imshow(I2.getPaddedMask(), origin='lower')
ax[row,2].imshow(algo.mask_comp, origin='lower')
ax[0,0].text(-0.6,0.45, 'pupil', fontsize=19,transform=ax[0,0].transAxes)
ax[1,0].text(-0.6,0.45, 'comp', fontsize=19,transform=ax[1,0].transAxes)
[18]:
Text(-0.6, 0.45, 'comp')
Now we set the coefficients of off-axis correction for x, y-projection of intra- and extra-image. This is for the mapping of coordinate from the telescope aperture to defocal image plane. The model describes how the mask changes as a function of the off-axis distance, and is a linear interpolation of the ZEMAX model parameters.
[19]:
# Load the offAxis correction coefficients
if model == "offAxis":
offAxisPolyOrder = algo.getOffAxisPolyOrder()
I1.setOffAxisCorr(algo._inst, offAxisPolyOrder)
I2.setOffAxisCorr(algo._inst, offAxisPolyOrder)
First iteration: image cocenter¶
Then we cocenter the images. This means first finding the weighing center of the image binary (found by default with CentroidRandomWalk via scipy.ndimage.center_of_mass and the effective weighing radius, as
radius = np.sqrt(np.sum(imgBinary) / np.pi)
Steps of the cocenter are: * find the center of mass of the image binary using scipy.ndimage.center_of_mass (x1, y1) * find the center of the image xc, yc ( called in coCenter stampCenterx1, stampCentery1) * find the radial shift given the pixelSize, defocal offset , reference distortion value in pixels (called fov), scale it by the distance to the center of FOV fieldDist/(fov/2), decompose radial shift into x,y components : xShift, yShift
* apply xShift, yShift to the stamp center coordinates, getting shifted x,y coordinates (xcs = xc + xShift ) * roll the image by the difference between the original x1,y1 and the xcs, ycs coordinates
Comparison of cocenter and recenter (done later during image compensation):
cocenter: * only done once, in 0th iteration * corrects for the non-linear off-axis distortion using the ZEMAX-calculated distortion coefficient, that depends on the distance from the center of the field of view
recenter: * done at each iteration, part of image compensation * aligns the image with the interpolation template used to transform to the pupil plane
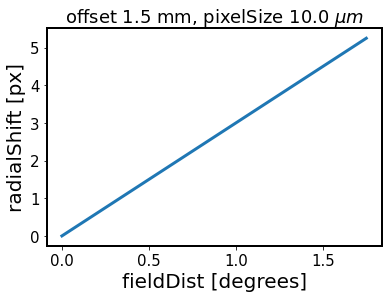
Show how the amount of radial shift applied at cocenter stage varies as a funtion of radial distance. This method is at the core of imageCoCenter:
[20]:
fov=3.5
offset = inst.defocalDisOffset # in meters
pixelSize = inst.pixelSize # in meters
radialShift = fov * (offset / 1e-3) * (10e-6 / pixelSize)
# define an array of possible field distances
fieldDist = np.linspace(0,fov/2)
plt.plot(fieldDist, radialShift * (fieldDist / (fov / 2)), lw=3)
plt.xlabel('fieldDist [degrees]')
plt.ylabel('radialShift [px]')
plt.title(f'offset {offset*1e3} mm, pixelSize {pixelSize*1e6} '+r'$\mu m$')
[20]:
Text(0.5, 1.0, 'offset 1.5 mm, pixelSize 10.0 $\\mu m$')
[21]:
# store images before co-centering
I1imgInit = I1.getImg()
I2imgInit = I2.getImg()
Show what imageCoCenter does inside CompensableImage:
[22]:
store = {'intra':{}, 'extra':{}}
store['intra'] = func.imageCoCenter_store(I1,algo._inst,fov=3.5, debugLevel=3,)
store['extra'] = func.imageCoCenter_store(I2,algo._inst,fov=3.5, debugLevel=3,)
imageCoCenter: (x, y) = ( 81.47, 80.69)
imageCoCenter: (x, y) = ( 78.84, 78.06)
We shift the image in the x and y direction given the
stampCenterx1 = stampCenterx1 + radialShift * cos(theta)
stampCentery1 = stampCentery1 + radialShift * sin(theta)
using np.roll :
np.roll(self.getImg(), int(np.round(stampCentery1 - y1)), axis=0)
We print the diagnostic below:
[23]:
for defocal in ['intra', 'extra']:
xc = store[defocal]['cocenter_centroid_x1']
yc = store[defocal]['cocenter_centroid_y1']
r = store[defocal]['cocenter_fieldDist']
dr = store[defocal]['cocenter_radialShift']
dx = store[defocal]['cocenter_xShift']
dy = store[defocal]['cocenter_yShift']
print(f'\n {defocal}')
print(f'x,y centroid = ({np.round(xc,3)},{np.round(yc,3)}) [px]')
print(f'field distance r={np.round(r,3)} [deg]')
print(f'radial shift = {np.round(dr,3)}[px]')
print(f'x,y-shift ({np.round(dx,3)},{np.round(dy,3)})[px]')
intra
x,y centroid = (81.466,80.69) [px]
field distance r=1.775 [deg]
radial shift = 5.324[px]
x,y-shift (-0.0,0.0)[px]
extra
x,y centroid = (78.839,78.06) [px]
field distance r=1.65 [deg]
radial shift = 4.951[px]
x,y-shift (-3.609,3.389)[px]
Illustrate the effect of imageCoCenter:
[24]:
I1shifts = [store['intra']['cocenter_x_shift_amount'], store['intra']['cocenter_y_shift_amount']]
I2shifts = [store['extra']['cocenter_x_shift_amount'], store['extra']['cocenter_y_shift_amount']]
[25]:
func.plot_imageCoCenter(algo, store,
I1,I2,
I1imgInit,I2imgInit,
I1shifts, I2shifts)
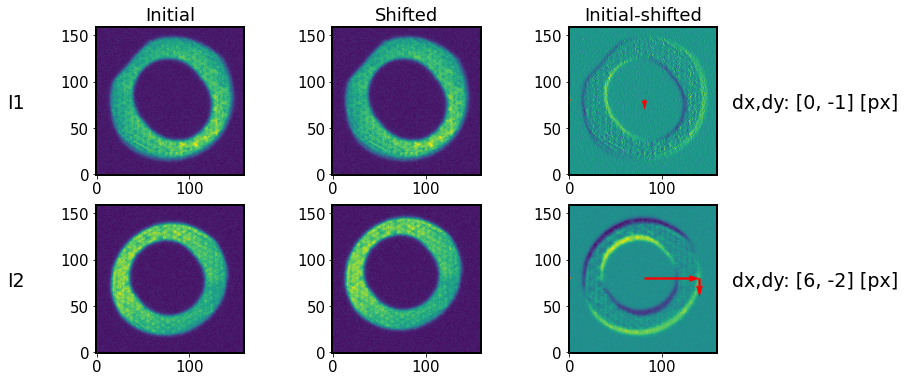
The “shadow” indicates a shift, marked by horizontal and vertical arrows (enlarged 10 times for illustration).
After the co-centering step we update the image. It is called “initial”, because at each step of the outer loop the compensation is done to that image. Also initialize the computing variables zcomp, zc related to estimated Zernikes, as well as wcomp, West related to wavefront estimate:
[26]:
# Update the self-initial image
I1.updateImgInit()
I2.updateImgInit()
# Initialize the variables used in the iteration.
algo.zcomp = np.zeros(algo.getNumOfZernikes())
algo.zc = algo.zcomp.copy()
dimOfDonut = algo._inst.dimOfDonutImg
algo.wcomp = np.zeros((dimOfDonut, dimOfDonut))
algo.West = algo.wcomp.copy()
algo.caustic = False
Image compensation¶
Each iteration compensates from the original image. The compSequence is taken from exp.yaml. The ztmp is filled with only as many elements of compSequence as the iteration number.
[27]:
# Rename this index (currentItr) for the simplification
jj = algo.currentItr
# Solve the transport of intensity equation (TIE)
if not algo.caustic:
# Reset the images before the compensation
I1.updateImage(I1.getImgInit().copy())
I2.updateImage(I2.getImgInit().copy())
if compMode == "zer":
# Zk coefficient from the previous iteration
ztmp = algo.zc.copy()
# Do the feedback of Zk from the lower terms first based on the
# sequence defined in compSequence
if jj != 0:
compSequence = algo.getCompSequence()
print(compSequence)
ztmp[int(compSequence[jj - 1]) :] = 0
print(f'ztmp:{ztmp}')
print(f'zcomp:{algo.zcomp}')
print(f'feedbackGain:{feedbackGain}')
print(f'ztmp*feedbackGain:{ztmp*feedbackGain}')
# Add partial feedback of residual estimated wavefront in Zk
algo.zcomp = algo.zcomp + ztmp * feedbackGain
print(f'zcomp:{algo.zcomp}')
ztmp:[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.]
zcomp:[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.]
feedbackGain:0.6
ztmp*feedbackGain:[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.]
zcomp:[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.]
Now we forward the image to the pupil calling:
# Remove the image distortion by forwarding the image to pupil
I1.compensate(self._inst, self, self.zcomp, model)
I2.compensate(self._inst, self, self.zcomp, model)
Steps below guide through the image compensation for the intra-focal image. Also see additional notes on the image compensation.
[28]:
# the calculated coefficients of the wavefront
zcCol = algo.zcomp
# Dimension of image
sm, sn = I1.getImg().shape
print('Image dimension:', sm, sn)
# Dimension of projected image on focal plane
projSamples = sm
# Let us create a look-up table for x -> xp first.
luty, lutx = np.mgrid[
-(projSamples / 2 - 0.5) : (projSamples / 2 + 0.5),
-(projSamples / 2 - 0.5) : (projSamples / 2 + 0.5),
]
Image dimension: 160 160
The look-up table is a meshgrid - a matrix representation of donut template pixel coordinates:
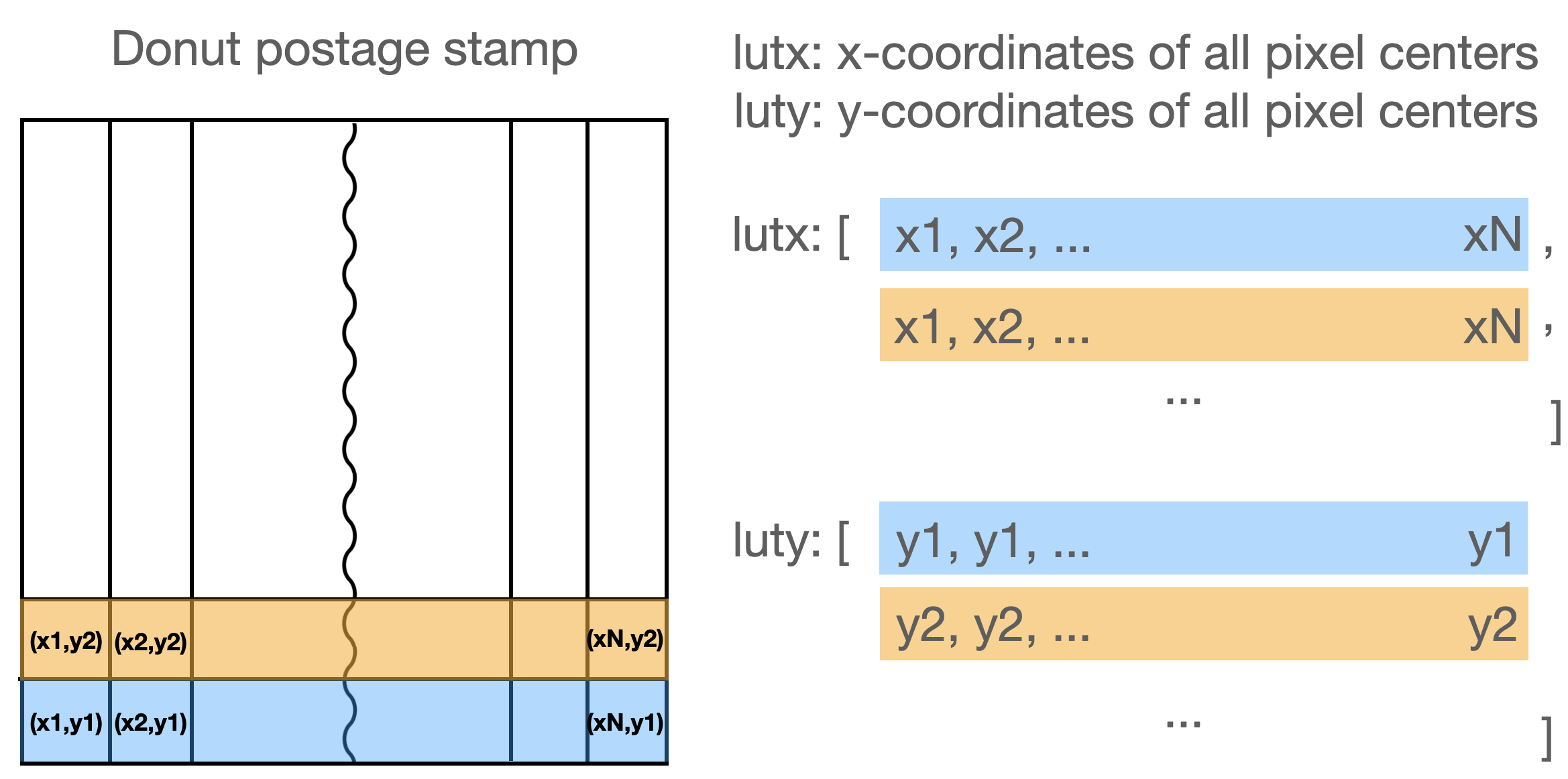
[29]:
luty
[29]:
array([[-79.5, -79.5, -79.5, ..., -79.5, -79.5, -79.5],
[-78.5, -78.5, -78.5, ..., -78.5, -78.5, -78.5],
[-77.5, -77.5, -77.5, ..., -77.5, -77.5, -77.5],
...,
[ 77.5, 77.5, 77.5, ..., 77.5, 77.5, 77.5],
[ 78.5, 78.5, 78.5, ..., 78.5, 78.5, 78.5],
[ 79.5, 79.5, 79.5, ..., 79.5, 79.5, 79.5]])
Then we calculate the sensor factor - the ratio of donut template size to donut size:
[30]:
sensorFactor = algo._inst.getSensorFactor()
lutx = lutx / (projSamples / 2 / sensorFactor)
luty = luty / (projSamples / 2 / sensorFactor)
[31]:
sensorFactor
[31]:
1.3157256778309412
[32]:
algo._inst.defocalDisOffset
[32]:
0.0015
[33]:
algo._inst.apertureDiameter
[33]:
8.36
[34]:
algo._inst.pixelSize
[34]:
1e-05
[35]:
algo._inst.dimOfDonutImg
[35]:
160
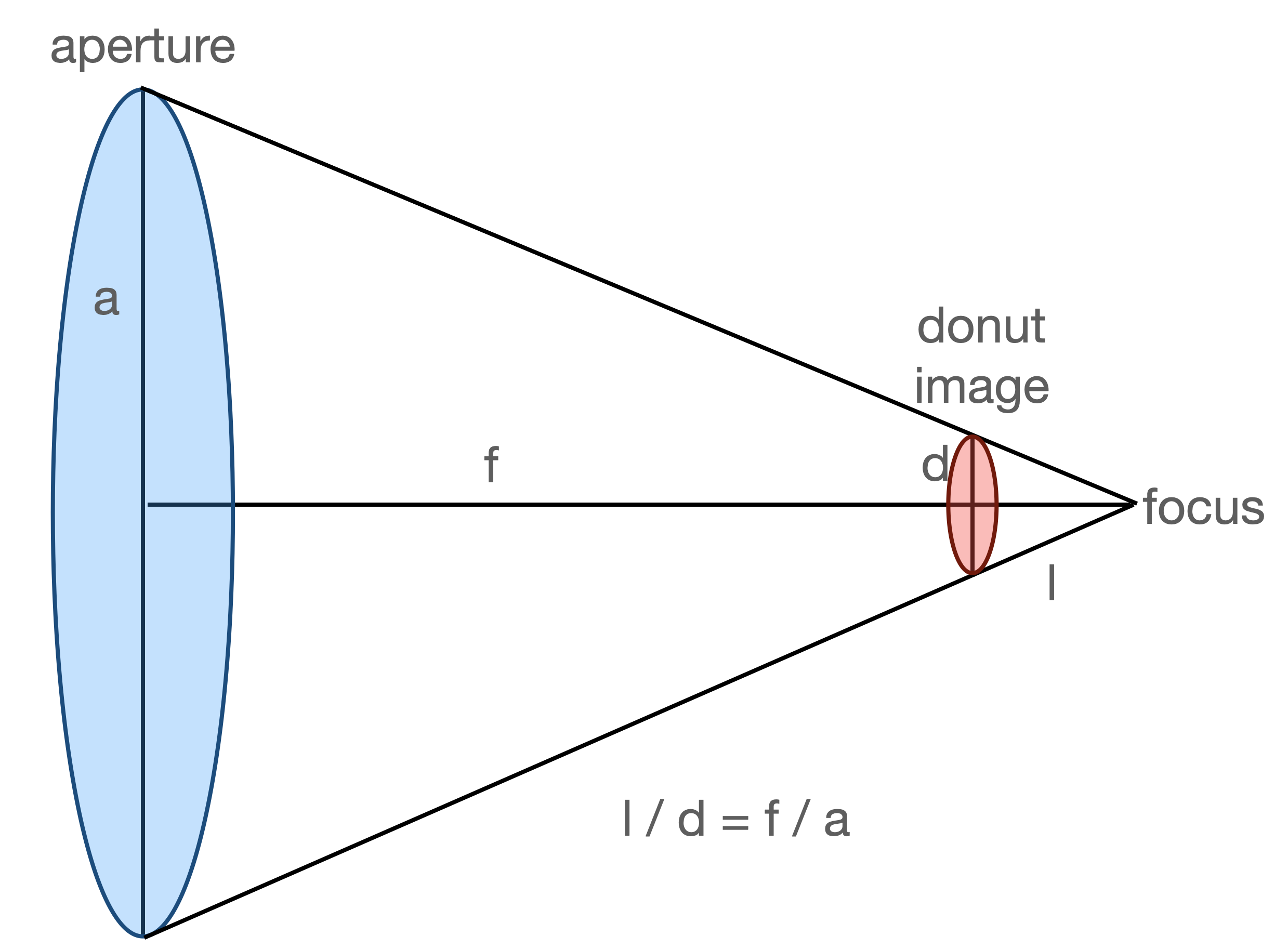
The sensor factor is calculated as
sensorFactor = self.dimOfDonutImg / (
self.defocalDisOffset * self.apertureDiameter / self.focalLength / self.pixelSize
)
This notation is the same as
dimOfDonut * [ (focalLength*pixelSize) / (offset*apertureDiameter) ] ,
where from the image above we have
d = (l*a) / f, i.e.
donutSizeInPixels = d / pixelSize = (offset*apertureDiameter ) / (focalLength*pixelSize)
with d being the donut size, so that indeed
sensorFactor = dimOfDonut / donutSizeInPixels
Thus we have showed that the sensor factor indeed stands for the ratio of donut template size to donut size.
Now we calculate the mapping from the image plane to the pupil (aperture) plane :
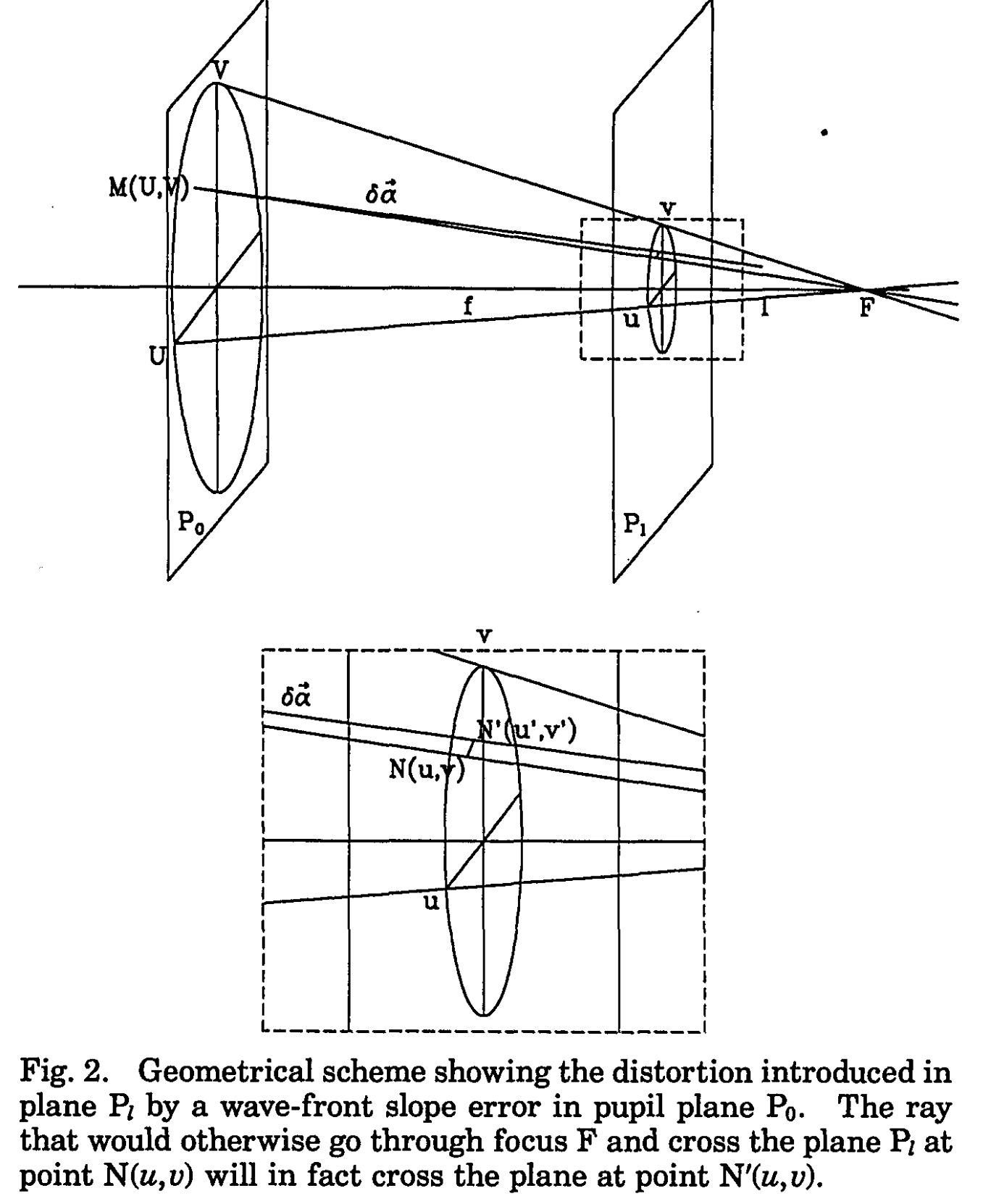
Fig.2 Roddier&Roddier+1993.
We consider defocused images because differences in illumination will correspond to wavefront curvature (we assume uniform or nearly uniform illumination of the pupil). As in Roddier+1987:
From geometrical optics considerations, it is easy to show that a local wavefront curvature will produce an excess of illumination in one plane and a lack of illumination in the other plane. The difference between the two illuminations will therefore provide a measure of the local wavefront curvature. The result should be insensitive to irradiance fluctuations in the pupil plane since they will produce a similar change of illumination in both planes and the effect will cancel out in the difference.
This step is also mentioned in Sec 2A of Xin2015
Assuming the intensity is equal to I0 everywhere inside the pupil and zero outside, we have the Neumann boundary conditions
We compensate/correct the intrafocal and extrafocal images for the aberrations of the current wavefront estimate by remapping the image flux using the Jacobian of the wavefront in the pupil plane.
[36]:
# Set up the mapping
lutxp, lutyp, J = I1._aperture2image(
inst, algo, zcCol, lutx, luty, projSamples, model
)
Let’s investigate the _aperture2image function. It first sets up the transformation in reduced coordinates from image plane to pupil plane, following Xin2015 eq.(9)-(11):
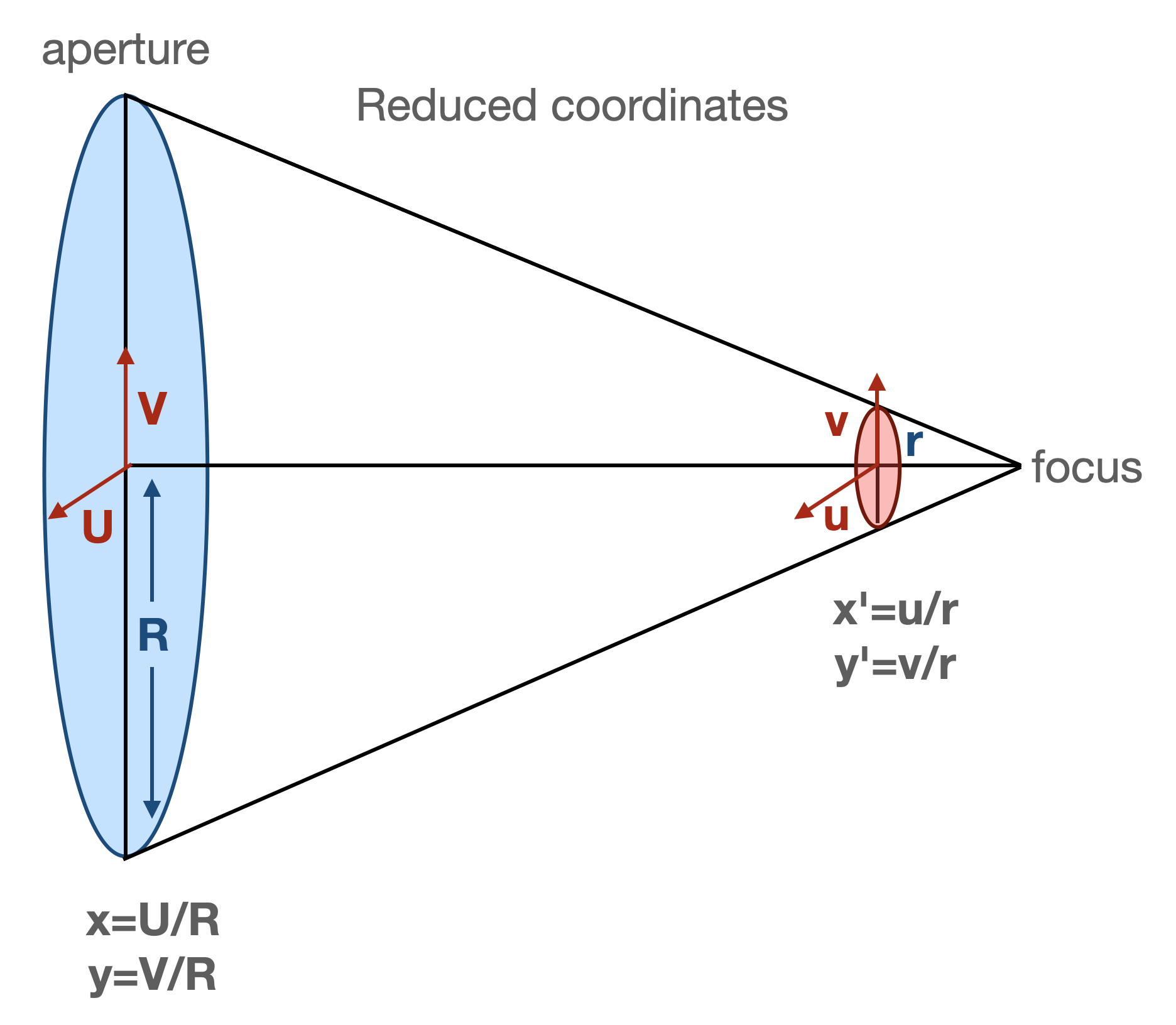
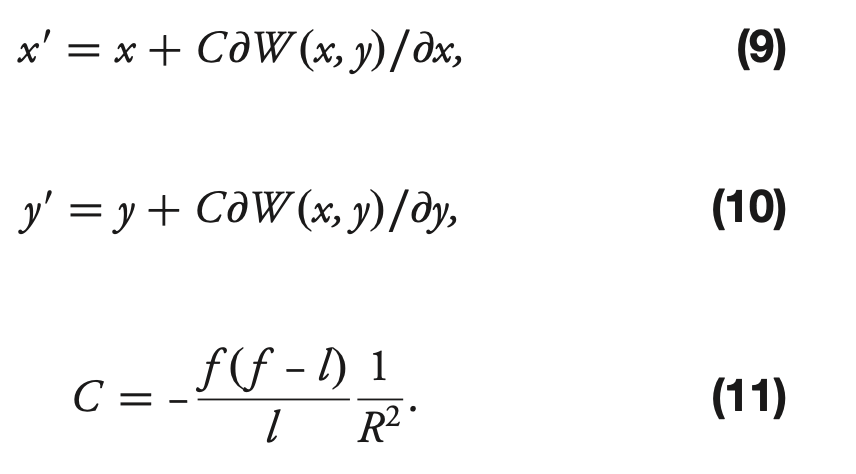
In the code we have
# Get the radius: R = D/2
R = inst.apertureDiameter / 2
# Calculate C = -f(f-l)/l/R^2. This is for the calculation of reduced
# coordinate.
defocalDisOffset = inst.defocalDisOffset
if self.defocalType == DefocalType.Intra:
l = defocalDisOffset
elif self.defocalType == DefocalType.Extra:
l = -defocalDisOffset
focalLength = inst.focalLength
myC = -focalLength * (focalLength - l) / l / R**2
The further transformation from the donut coordinates lutx , luty to pupil coordinates lutxp, lutyp depends on the optical model. From AOS documentation:
“paraxial” means the all incident light focuses into the focal point.
“on-axis” allows the light from edge of lens (optical system) not to focus on the focal point.
“off-axis” allows the light comes in the off-axis direction, and the focal point is not (0,0) anymore.
Ideally, the FieldXY=(0,0) in “off-axis” should give the same result as “on-axis”.
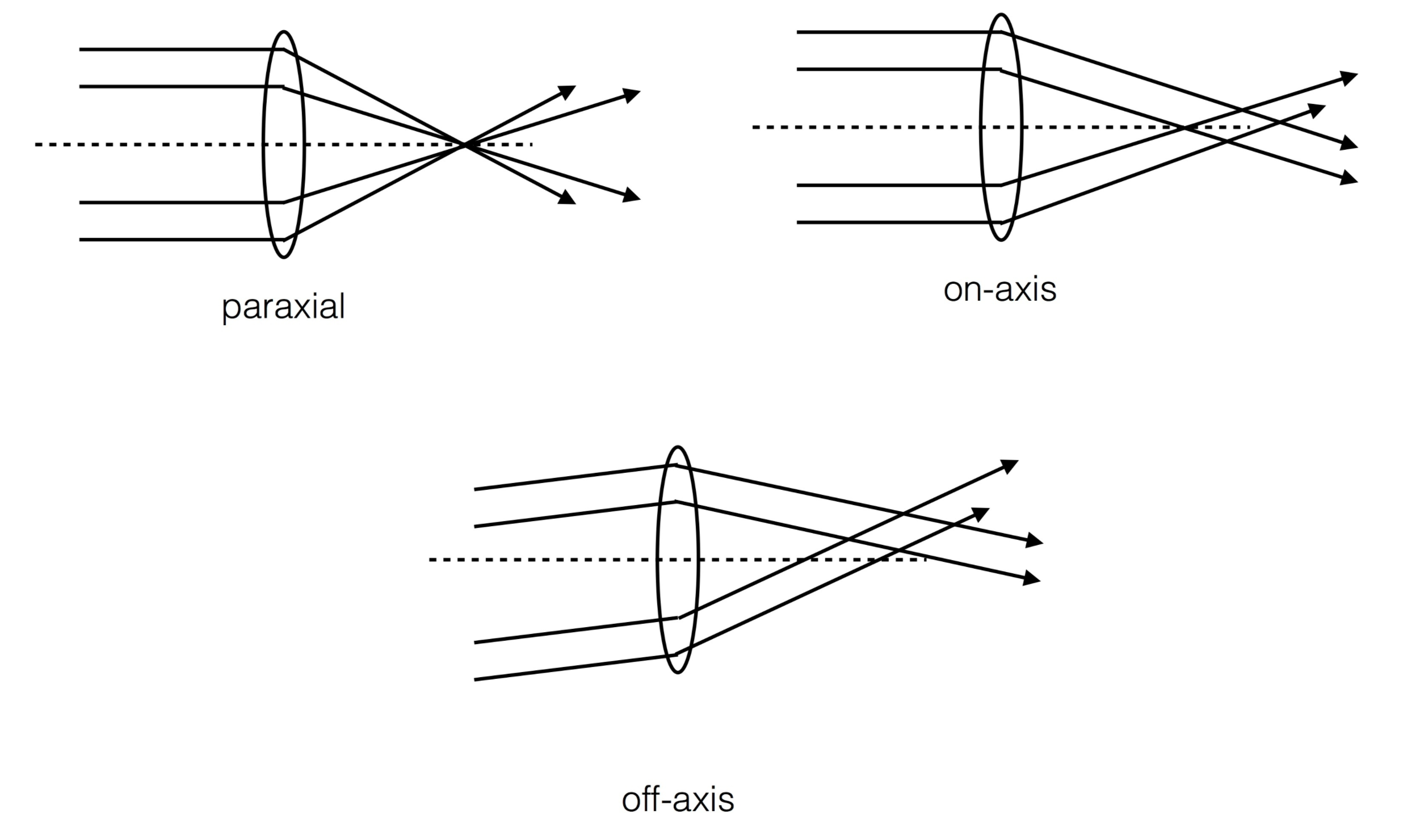
In a fast-beam optical system like the LSST the wavefront error defined on the reference sphere at the exit pupil can no longer be projected on the pupil plane in a straightforward, linear way. The steepness of the fast-beam reference sphere results in non- linear mapping from the pupil (x–y plane) to the intrafocal and extrafocal images (x0 –y0 plane). Consequently, the intensity distribution on the aberration-free image is no longer uniform and would give rise to anomalous wavefront aberration estimates. This effect also causes the obscuration ratio as seen at the intrafocal and extrafocal image planes to be different from that on the pupil; thus the linear equations for the mapping between x–y and x0–y0 [Eqs. (9) and (10)] are no longer valid. Therefore, we need to quantify the nonlinear fast-beam effect, and be able to remove it so that the corrected images can be processed using the iterative FFT or the series expansion algorithms.
That’s why for the on-axis situation equations (9)-(11) from Xin+2015 become (22)-(24) :
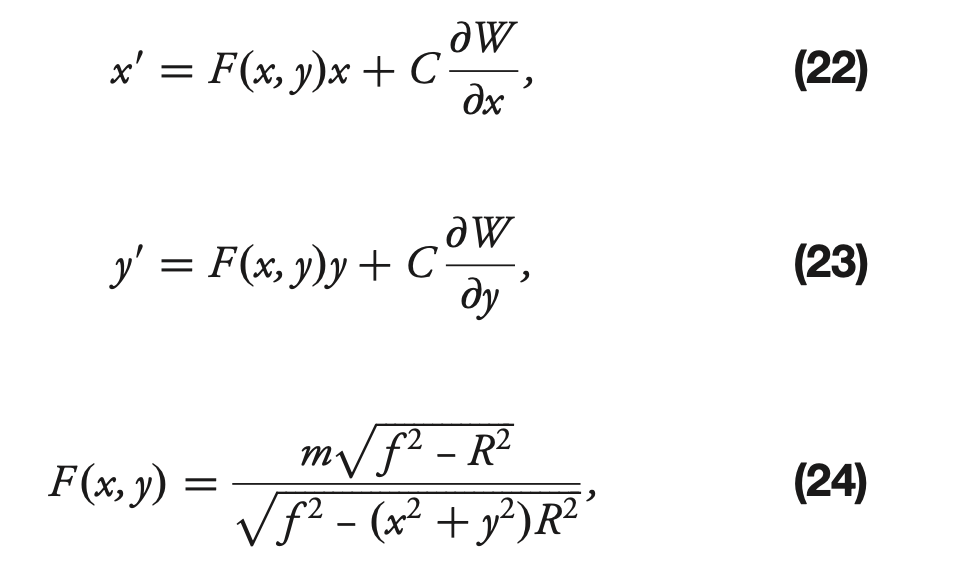
(and for off-axis, the situation is more complex, hence was not described in the paper, but covers hundreds of lines of code).
In the end we have lutxp, lutyp set of pupil coordinates.
The intensity is transformed using the Jacobian . Eq.13 below is from Roddier+1993:
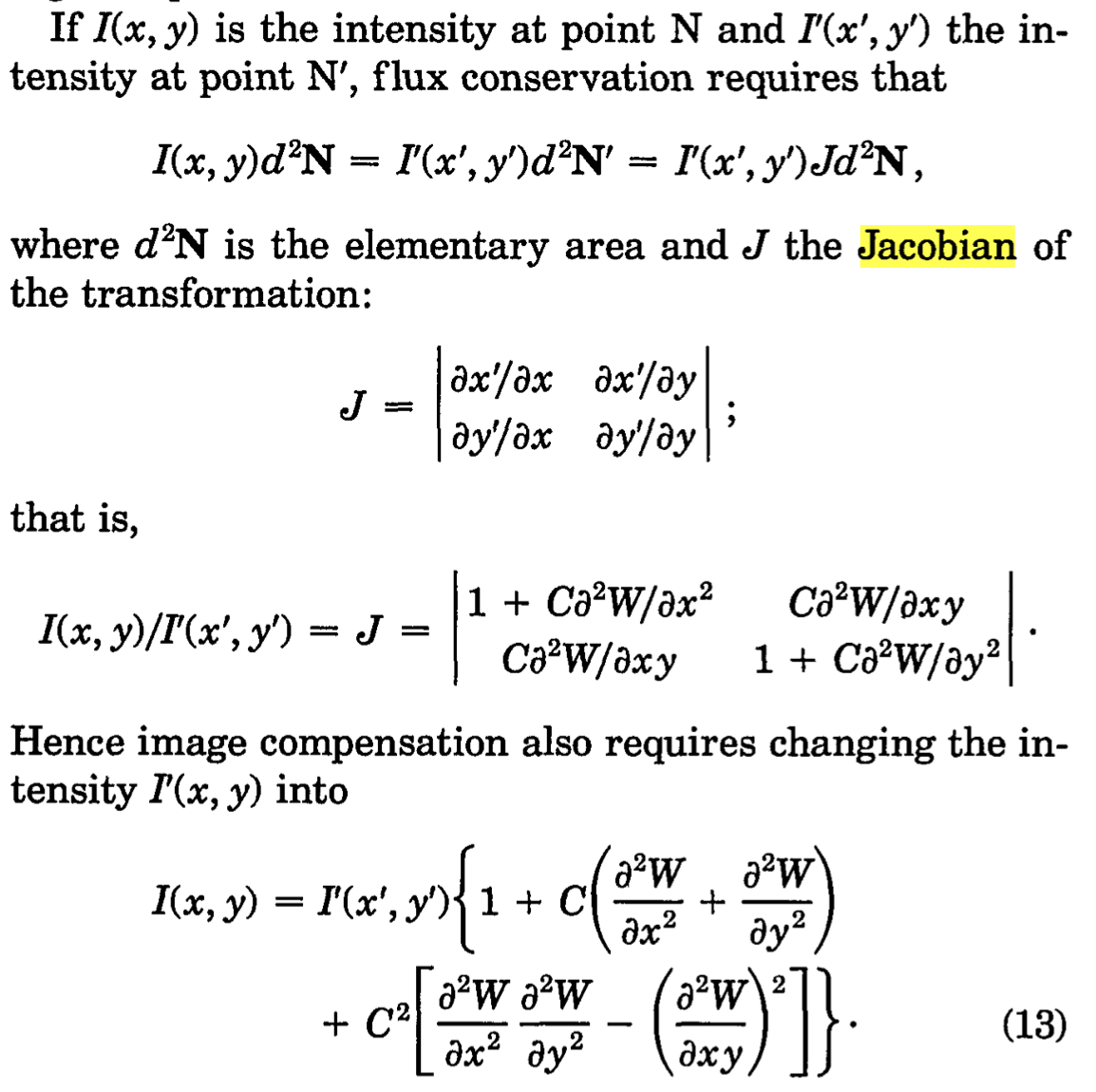
We can inspect the projection to see that for off-axis case it is far from trivial:
[37]:
show_lutxyp = I1._showProjection(
lutxp, lutyp, sensorFactor, projSamples, raytrace=False
)
fig,ax= plt.subplots(1,2,figsize=(8,4))
ax[0].imshow(show_lutxyp, origin='lower')
ax[0].set_title('x,y projection \nof image on pupil')
ax[1].imshow(J, origin='lower')
ax[1].set_title(f'Jacobian for \n{model} model')
[37]:
Text(0.5, 1.0, 'Jacobian for \noffAxis model')

The following step adds a margin of 20 pixels in each dimension to make room for the morphological operations:
[38]:
# Extend the dimension of image by 20 pixel in x and y direction
show_lutxyp_padded = padArray(show_lutxyp, projSamples + 20)
[39]:
plt.imshow(show_lutxyp_padded, origin='lower')
[39]:
<matplotlib.image.AxesImage at 0x7f60fb50fbb0>
This just made the stamp larger in each dimension
Now initialize the basic morphological structure:
[40]:
# Get the binary matrix of image on pupil plane if raytrace=False
struct0 = generate_binary_structure(2, 1)
struct0
[40]:
array([[False, True, False],
[ True, True, True],
[False, True, False]])
[41]:
plt.imshow(struct0)
[41]:
<matplotlib.image.AxesImage at 0x7f60fb55e500>
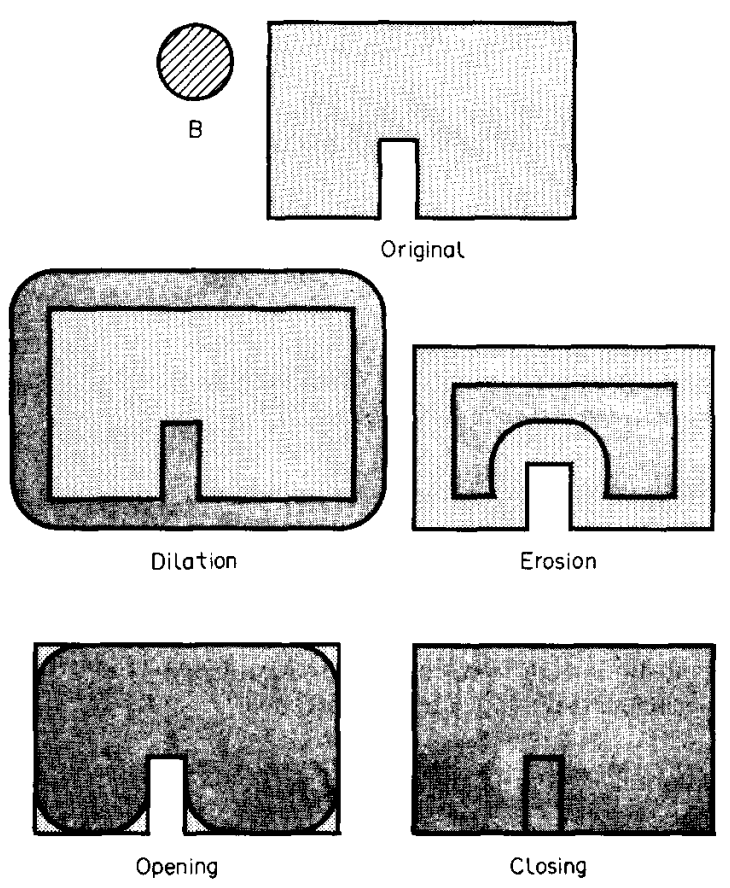
Dilation and erosion are two of the fundamental operations in morphological image processing (see eg. Sapiro+1993).
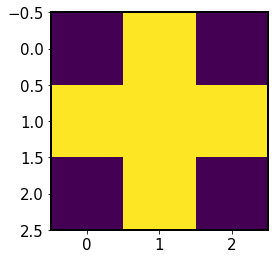
 The next step
The next step iterate_structure dilates the structure with itself. From a 3x3 array it makes an 9x9 array, effectively “smoothing” the edges:
[42]:
struct1 = iterate_structure(struct0, 4)
plt.imshow(struct1)
[42]:
<matplotlib.image.AxesImage at 0x7f60f9870910>
Next we dilate this structure with the one we started with twice:
[43]:
struct = binary_dilation(struct1, structure=struct0, iterations=2).astype(int)
plt.imshow(struct)
[43]:
<matplotlib.image.AxesImage at 0x7f60f987ef80>
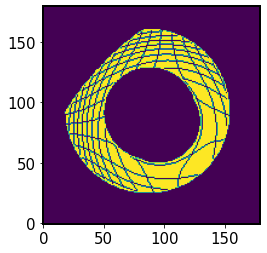
Now using this as a structuring element we perform binary dilation on the projection lookup table. It acts as a smoothing eraser, removing the marks of the projection grid and enlarging slightly the envelope of the LUT:
[44]:
show_lutxyp_dilated = binary_dilation(show_lutxyp_padded, structure=struct)
plt.imshow(show_lutxyp_dilated, origin='lower')
[44]:
<matplotlib.image.AxesImage at 0x7f60f9900d90>

Now this is eroded, to remove the effects of the envelope added in the process of dilation:
[45]:
show_lutxyp_eroded = binary_erosion(show_lutxyp_dilated, structure=struct)
plt.imshow(show_lutxyp_eroded, origin='lower')
[45]:
<matplotlib.image.AxesImage at 0x7f60f9f6e770>

Next we extract the region in size equal to the original image (160x160 px), since earlier it was padded by 20 pixels in each direction to make space for the operation of binary dilation :
[46]:
# Extract the region from the center of image and get the original one
show_lutxyp_extracted = extractArray(show_lutxyp_eroded, projSamples)
plt.imshow(show_lutxyp_extracted, origin='lower')
[46]:
<matplotlib.image.AxesImage at 0x7f60f9fe1330>

Now the re-centering step centerOnProjections which ensures that I1 and I2 after being shifted to the pupil plane are aligned.
Inside centerOnProjection we :
[47]:
img = I1.getImg()
template = show_lutxyp_extracted.astype(float)
window = 20
# Calculate the cross-correlate
corr = correlate(img, template, mode="same")
[48]:
fig,ax = plt.subplots(1,3,figsize=(12,4))
ax[0].imshow(img, origin='lower')
ax[1].imshow(template,origin='lower')
ax[2].imshow(corr,origin='lower')
ax[0].set_title('image')
ax[1].set_title('template')
ax[2].set_title('correlation')
[48]:
Text(0.5, 1.0, 'correlation')

We only select the central region of the image convolution:
[49]:
# Calculate the shifts of center
# Only consider the shifts in a certain window (range)
# Align the input image to the center of template
length = template.shape[0]
print(length)
center = length // 2
print(center)
r = window // 2
print(r)
160
80
10
[50]:
mask = np.zeros(corr.shape)
mask[center - r : center + r, center - r : center + r] = 1
plt.imshow(mask, origin='lower')
[50]:
<matplotlib.image.AxesImage at 0x7f60fb32ac80>
After convolving the template with the mask we select only the central region of the convolved image :
[51]:
plt.imshow(corr*mask)
[51]:
<matplotlib.image.AxesImage at 0x7f60fb3cb8b0>
We find the location of peak pixel value in this window, and shift the image so that the peak is in the center:
[52]:
idx = np.argmax(corr * mask)
idx
[52]:
13041
[53]:
# The above 'idx' is an integer. Need to rematch it to the
# two-dimension position (x and y)
xmatch = idx % length
ymatch = idx // length
print(xmatch, ymatch)
81 81
[54]:
dx = center - xmatch
dy = center - ymatch
print(dx,dy)
-1 -1
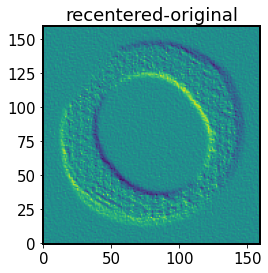
show the effect of recentering on the image:
[55]:
# Shift/ recenter the input image
imgRecenter = np.roll(np.roll(img, dx, axis=1), dy, axis=0)
plt.imshow(imgRecenter-img, origin='lower')
plt.title('recentered-original')
[55]:
Text(0.5, 1.0, 'recentered-original')
[56]:
# Recenter the image
imgRecenter = I1.centerOnProjection(
I1.getImg(), show_lutxyp.astype(float), window=20
)
[57]:
# update the image
I1.updateImage(imgRecenter)
# Construct the interpolant to get the intensity on (x', p') plane
# that corresponds to the grid points on (x,y)
yp, xp = np.mgrid[
-(sm / 2 - 0.5) : (sm / 2 + 0.5), -(sm / 2 - 0.5) : (sm / 2 + 0.5)
]
xp = xp / (sm / 2 / sensorFactor)
yp = yp / (sm / 2 / sensorFactor)
# Put the NaN to be 0 for the interpolate to use
lutxp[np.isnan(lutxp)] = 0
lutyp[np.isnan(lutyp)] = 0
# Construct the function for interpolation
ip = RectBivariateSpline(yp[:, 0], xp[0, :], I1.getImg(), kx=1, ky=1)
# Construct the projected image by the interpolation
lutIp = ip(lutyp, lutxp, grid=False)
Thus we have constructed an interpolated image (that accounts for coordinate transformation), which together with the Jacobian (adjusting the intensity by applying flux conservation) provides an image interpolated to the pupil plane:
[58]:
# image interpolated to pupil plane
fig,ax = plt.subplots(1,3,figsize=(12,4))
ax[0].set_title('image interpolated \nto pupil coords')
ax[0].imshow(lutIp, origin='lower')
ax[1].set_title('Jacobian')
ax[1].imshow(J, origin='lower')
ax[2].set_title('I*J')
ax[2].imshow(lutIp * J, origin='lower')
[58]:
<matplotlib.image.AxesImage at 0x7f60fc3a45b0>

At this point, we’re back in Algorithm, single iteration. We can call all the above steps as a single command:
[59]:
# undo the changes done in the above explanation for I1
I1.updateImage(I1.getImgInit())
# perform image compensation for intra- and extra-focal images
if not algo.caustic:
if compMode == "zer":
# Remove the image distortion by forwarding the image to pupil
I1.compensate(algo._inst, algo, algo.zcomp, model)
I2.compensate(algo._inst, algo, algo.zcomp, model)
[60]:
# Check the image condition. If there is the problem, done with
# this _singleItr().
if (I1.isCaustic() is True) or (I2.isCaustic() is True):
algo.converge[:, jj] = algo.converge[:, jj - 1]
algo.caustic = True
#return
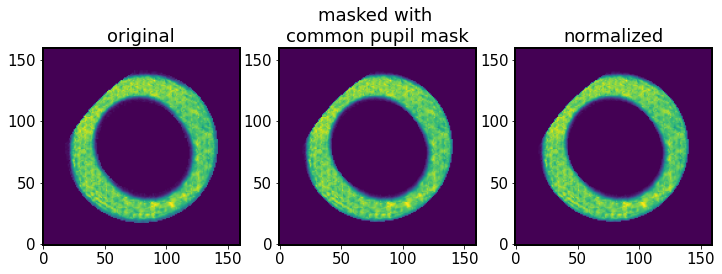
Apply pupil mask¶
Now we apply the common pupil mask. As mentioned in in Sec 3D of Xin+2015:
To avoid anomalous signal due to the difference in vignetting from entering the wavefront estimation results, we mask off the intrafocal and extrafocal images using a common pupil mask, which is the logical AND of the pupil masks at the intrafocal and extrafocal field positions.
Inside _applyI1I2mask_pupil :
[61]:
# Get the overlap region of images and do the normalization.
if I1.getFieldXY() != I2.getFieldXY():
# Get the overlap region of image
I1_overlap = I1.getImg() * algo.mask_pupil
# Rotate mask_pupil by 180 degree through rotating two times of 90
# degree because I2 has been rotated by 180 degree already.
I2_rotated = I2.getImg() * np.rot90(algo.mask_pupil, 2)
# Do the normalization of image.
I1_norm = I1_overlap / np.sum(I1_overlap)
I2_norm = I2_rotated / np.sum(I2_rotated)
[62]:
fig,ax = plt.subplots(1,3,figsize=(12,4))
ax[0].imshow(I1.getImg(), origin='lower')
ax[1].imshow(I1_overlap, origin='lower')
ax[2].imshow(I1_norm, origin='lower')
ax[0].set_title('original')
ax[1].set_title('masked with \ncommon pupil mask')
ax[2].set_title('normalized')
[62]:
Text(0.5, 1.0, 'normalized')
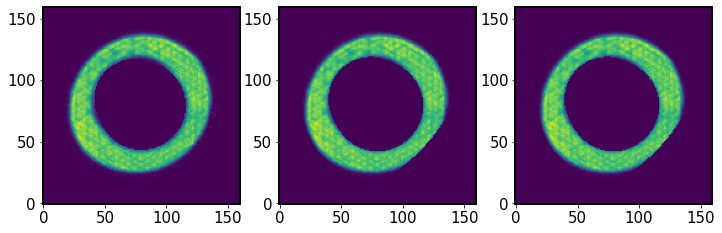
Same as above, but for the extra-focal donut (multiplied by the rotated mask):
[63]:
fig,ax = plt.subplots(1,3,figsize=(12,4))
ax[0].imshow(I2.getImg(), origin='lower')
ax[1].imshow(I2_rotated, origin='lower')
ax[2].imshow(I2_norm, origin='lower')
[63]:
<matplotlib.image.AxesImage at 0x7f60f9cc5000>
[64]:
# Correct the defocal images if I1 and I2 are belong to different
# sources, which is determined by the (fieldX, field Y)
I1, I2 = algo._applyI1I2mask_pupil(I1, I2)
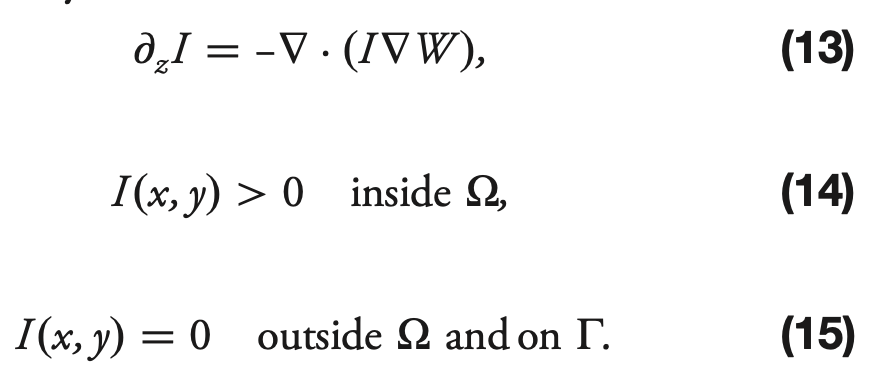
Solve Poisson’s equation (inner loop)¶
It is called via
# Solve the Poisson's equation
self.zc, self.West = self._solvePoissonEq(I1, I2, jj)
First we find an infinitesimal volume element \(\mathrm{d} \Omega\) used in eq.17 below (adapted from Xin+2015):
[65]:
# Calculate the aperture pixel size
apertureDiameter = algo._inst.apertureDiameter
sensorFactor = algo._inst.getSensorFactor()
dimOfDonut = algo._inst.dimOfDonutImg
aperturePixelSize = apertureDiameter * sensorFactor / dimOfDonut
# Calculate the differential Omega
dOmega = aperturePixelSize**2
# Solve the Poisson's equation based on the type of algorithm
numTerms = algo.getNumOfZernikes()
zobsR = algo.getObsOfZernikes()
PoissonSolver = algo.getPoissonSolverName()
The sensor factor (ratio of donut postage stamp image size to donut size) is the same as calculated above during the image compensation. We quickly prove that sensorFactor is indeed just a ratio of donut template size in px to donut size in px :
[66]:
offset = algo._inst.defocalDisOffset
apertureDiameter = algo._inst.apertureDiameter
focalLength = algo._inst.focalLength
pixelSize = algo._inst.pixelSize
donutSize = (offset*apertureDiameter) / (focalLength*pixelSize)
donutSize
[66]:
121.60589604344452
[67]:
dimOfDonut/ donutSize
[67]:
1.3157256778309412
[68]:
sensorFactor
[68]:
1.3157256778309412
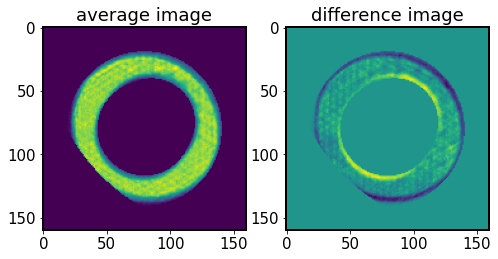
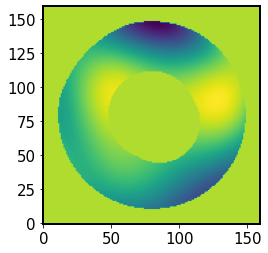
Next we calculate I0 and dI - the image sum (to approximate the mean intensity) and the difference (to approximate the change in intensity across \(\partial z\)), as in Eq.(3) in Xin+2015.
[69]:
# Calculate I0 and dI
I0, dI = algo._getdIandI(I1, I2)
[70]:
fig,ax = plt.subplots(1,2,figsize=(8,4))
ax[0].imshow(I0)
ax[0].set_title('average image')
ax[1].imshow(dI)
ax[1].set_title('difference image')
[70]:
Text(0.5, 1.0, 'difference image')
This step calculates the sensor coordinates. These are pixel coordinates scaled by the donut radius, i.e. they are in terms of multiples of donut radii:
ySensorGrid, xSensorGrid = np.mgrid[
-(self.dimOfDonutImg / 2 - 0.5) : (self.dimOfDonutImg / 2 + 0.5),
-(self.dimOfDonutImg / 2 - 0.5) : (self.dimOfDonutImg / 2 + 0.5),
]
#i.e. xSensorGrid = [-79.5,.....79.5] as before , since donut template is 160 px across
sensorFactor = self.getSensorFactor() = ( template size ) / ( donut size )
denominator = self.dimOfDonutImg / 2 / sensorFactor = (donut radius)
self.xSensor = xSensorGrid / denominator
# i.e. xSensor = [-1.30750239 -1.29105582 ... 1.29105582 , 1.30750239]
[71]:
xSensor, ySensor = algo._inst.getSensorCoor()
We multiply these coordinates by the computational mask. This limits the array to the extent of the mask:
[72]:
xSensor = xSensor * algo.mask_comp
ySensor = ySensor * algo.mask_comp
In the following we obtain Zernikes and Zernike x- and y- gradients. They come from galsim.zernike.zernikeBasis:
[73]:
# Get Zernike and gradient bases from cache. These are each
# (nzk, npix, npix) arrays, with the first dimension indicating
# the Noll index.
zk, dzkdx, dzkdy = algo._zernikeBasisCache()
The zk array contains 22 sub-arrays (equal to the number of fitted Zernike coefficients), each 160x160 px in size (equal to the size of postage stamp images):
[74]:
zk.shape
[74]:
(22, 160, 160)
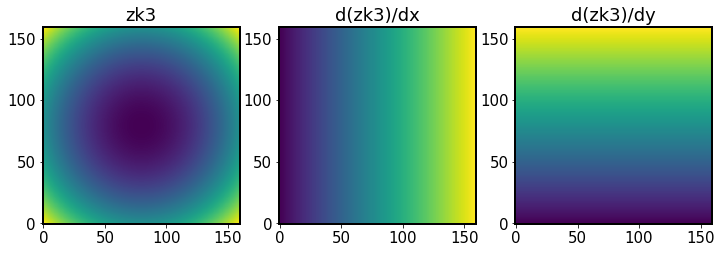
Show a single Zk, and its dx, dy gradients:
[75]:
fig,ax = plt.subplots(1,3,figsize=(12,4))
N=3
ax[0].imshow(zk[N,], origin='lower')
ax[0].set_title(f'zk{N}')
ax[1].imshow(dzkdx[N,],origin='lower')
ax[1].set_title(f'd(zk{N})/dx')
ax[2].imshow(dzkdy[N,],origin='lower')
ax[2].set_title(f'd(zk{N})/dy')
[75]:
Text(0.5, 1.0, 'd(zk3)/dy')
Now we proceed to solve the Transport of Intensity Equation (TIE) via series expansion. From Xin+2015, Sec2B:
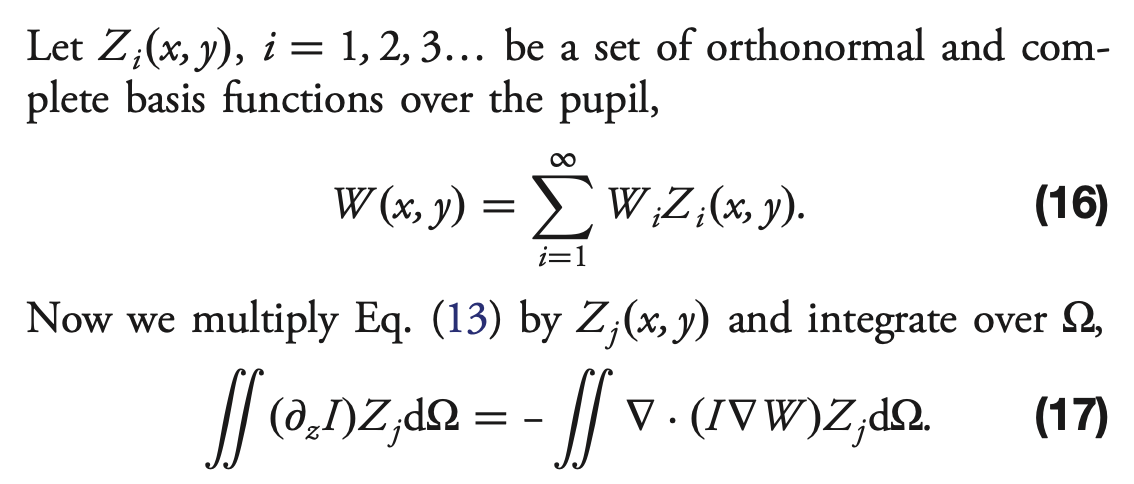
[76]:
# Eqn. (19) from Xin et al., Appl. Opt. 54, 9045-9054 (2015).
# F_j = \int (d_z I) Z_j d_Omega
F = np.tensordot(dI, zk, axes=((0, 1), (1, 2))) * dOmega
Note : this is not exactly eq.19, because instead of calculating
$F = \int\int `(:nbsphinx-math:partial I / :nbsphinx-math:partial z) Z_{j} d:nbsphinx-math:Omega `$
we’ve only got here
\(\int\int \partial I Z_{j} d\Omega\)
that is why we need to divide later by \(\partial z\) (approximated by \(\Delta z\), i.e. \(f(f-l)/l\), eq.5 in Xin+2015)
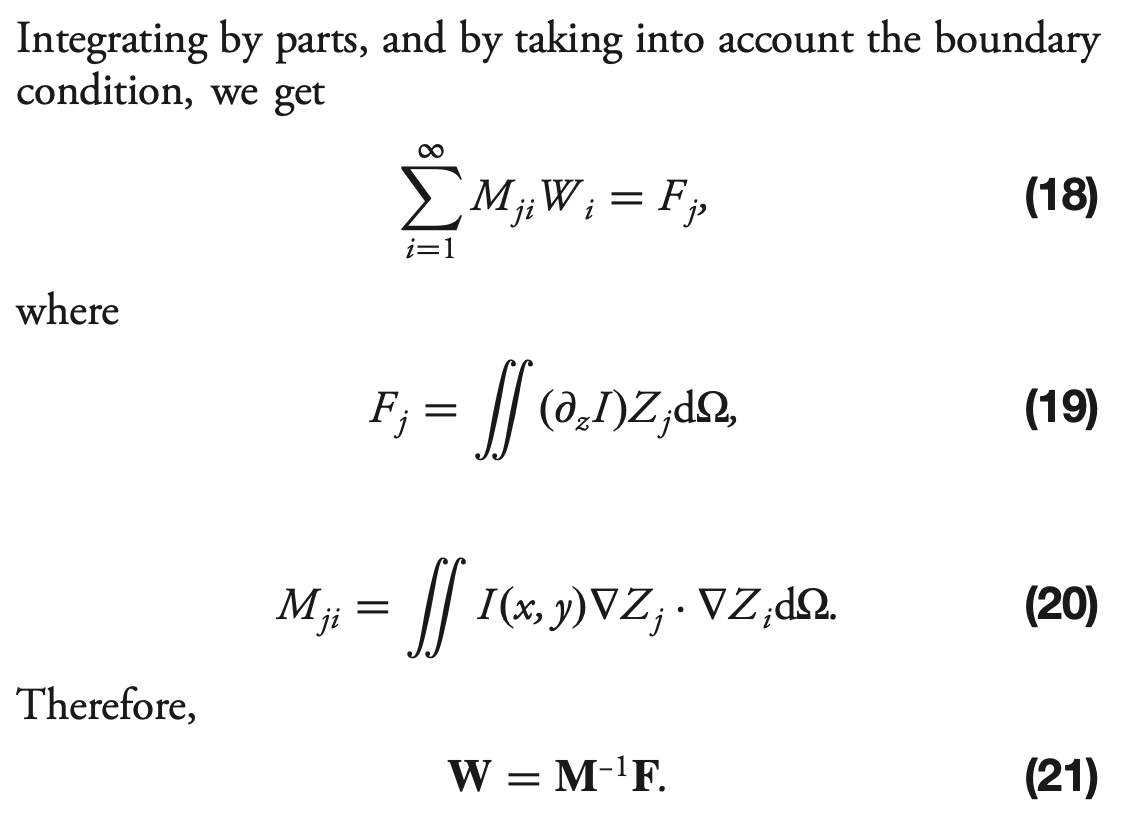
[77]:
# Eqn. (20) from Xin et al., Appl. Opt. 54, 9045-9054 (2015).
# M_ij = \int I (grad Z_j) . (grad Z_i) d_Omega
# = \int I (dZ_i/dx) (dZ_j/dx) d_Omega
# + \int I (dZ_i/dy) (dZ_j/dy) d_Omega
Mij = np.einsum("ab,iab,jab->ij", I0, dzkdx, dzkdx)
Mij += np.einsum("ab,iab,jab->ij", I0, dzkdy, dzkdy)
Mij *= dOmega / (apertureDiameter / 2.0) ** 2
[78]:
# Calculate dz
focalLength = algo._inst.focalLength
offset = algo._inst.defocalDisOffset
dz = 2 * focalLength * (focalLength - offset) / offset
# Define zc
zc = np.zeros(numTerms)
# Consider specific Zk terms only
idx = algo.getZernikeTerms()
[79]:
focalLength
[79]:
10.312
[80]:
offset
[80]:
0.0015
Solve \(W= M^{-1} F\), dividing \(F\) by \(\partial z\) to close eq.(19) (above we only calculated \(dI Z d\Omega\) rather than \((\partial I / \partial z )Z d\Omega\)):
[81]:
# Solve the equation: M*W = F => W = M^(-1)*F
zc_tmp = np.linalg.lstsq(Mij[:, idx][idx], F[idx], rcond=None)[0] / dz
zc[idx] = zc_tmp
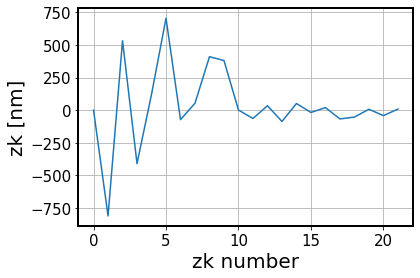
Illustrate the initial estimated wavefront:
[82]:
fig,ax = plt.subplots(1,1,figsize=(6,4))
ax.plot(zc_tmp*1e9)
ax.set_xlabel('zk number')
ax.set_ylabel('zk [nm]')
ax.grid()
[83]:
from lsst.ts.wep.cwfs.Tool import ZernikeAnnularEval
# Estimate the wavefront surface based on z4 - z22
# z0 - z3 are set to be 0 instead
West = ZernikeAnnularEval(
np.concatenate(([0, 0, 0], zc[3:])), xSensor, ySensor, zobsR
)
Illustrate the estimated wavefront, used for image compensation in the next step of the outer loop:
[84]:
plt.imshow(West, origin='lower')
[84]:
<matplotlib.image.AxesImage at 0x7f60fb72d960>
[85]:
# pass the result of solving Poisson equation to algo
algo.zc = zc
algo.West = West
[86]:
# zks from current iteration
algo.zc
[86]:
array([ 0.00000000e+00, -8.11662860e-07, 5.32176247e-07, -4.09957070e-07,
1.21267249e-07, 7.05065498e-07, -7.26892248e-08, 5.29453797e-08,
4.09984803e-07, 3.80384617e-07, 6.68396160e-10, -6.39617286e-08,
3.39015348e-08, -8.68395109e-08, 5.07315248e-08, -1.78579284e-08,
1.94569699e-08, -6.74214192e-08, -5.34282465e-08, 6.63418581e-09,
-4.21152277e-08, 7.92490377e-09])
[87]:
from lsst.ts.wep.cwfs.Tool import (
padArray,
extractArray,
ZernikeAnnularEval,
ZernikeMaskedFit)
# Record/ calculate the Zk coefficient and wavefront
if compMode == "zer":
algo.converge[:, jj] = algo.zcomp + algo.zc
xoSensor, yoSensor = algo._inst.getSensorCoorAnnular()
The getSensorCoorAnnular function finds the sensor coordinates masking out the positions outside the annular aperture range
[88]:
#setSensorCoorAnnular:
# Get the position index that is out of annular aperature range
obscuration = algo._inst.obscuration
r2Sensor = algo._inst.xSensor**2 + algo._inst.ySensor**2
Initially r2Sensor is the radial coordinate, \(r=x^2+y^2\)
[89]:
plt.imshow(r2Sensor, origin='lower')
[89]:
<matplotlib.image.AxesImage at 0x7f60fb779120>
We mask region outside the aperture radius, and below the obscuration radius:
[90]:
idx = (r2Sensor > 1) | (r2Sensor < obscuration**2)
r2Sensor[idx] = np.nan
plt.imshow(r2Sensor, origin='lower')
[90]:
<matplotlib.image.AxesImage at 0x7f60fbc10ee0>
This is used to evaluate the calculated wavefront:
[91]:
if compMode == "zer":
wavefront_previous_estimate = ZernikeAnnularEval(
np.concatenate(([0, 0, 0], algo.zcomp[3:])),
xoSensor,
yoSensor,
algo.getObsOfZernikes(),
)
algo.wcomp = algo.West + wavefront_previous_estimate
Finally, the information about converged Zernike coefficients in \(j-th\) iteration of the outer loop is stored as \(Z_{j}\). It is compared with the values from previous iteration \(Z_{j-1}\). If \(\sum |Z_{j} - Z_{j-1}|\) is smaller than the tolerance level, the calculation is assumed to have converged.
[92]:
if algo.caustic:
# Once we run into caustic, stop here, results may be close to real
# aberration.
# Continuation may lead to disastrous results.
algo.converge[:, jj] = algo.converge[:, jj - 1]
# Record the coefficients of normal/ annular Zernike polynomials after
# z4 in unit of nm
algo.zer4UpNm = algo.converge[3:, jj] * 1e9
# Status of iteration
stopItr = False
# Calculate the difference
if jj > 0:
diffZk = (
np.sum(np.abs(algo.converge[:, jj] - algo.converge[:, jj - 1])) * 1e9
)
# Check the Status of iteration
if diffZk < tol:
stopItr = True
# Update the current iteration time
algo.currentItr += 1
# Show the Zk coefficients in interger in each iteration
if algo.debugLevel >= 2:
print("itr = %d, z4-z%d" % (jj, algo.getNumOfZernikes()))
print(np.rint(algo.zer4UpNm))
Multiple iterations¶
In the following we run multiple iterations of the outer loop, and show how the intermediate data products change:
[93]:
mag = 15
repo_dir = f'/sdf/data/rubin/u/scichris/WORK/AOS/DM-36218/wfs_grid_{mag}/phosimData/'
instrument = 'LSSTCam'
collection = 'ts_phosim_9006000'
sensor='R04'
donutStampsExtra, extraFocalCatalog = func.get_butler_stamps(repo_dir,instrument=instrument,
iterN=0, detector=f"{sensor}_SW0",
dataset_type = 'donutStampsExtra',
collection=collection)
donutStampsIntra, intraFocalCatalog = func.get_butler_stamps(repo_dir,instrument=instrument,
iterN=0, detector=f"{sensor}_SW1",
dataset_type = 'donutStampsIntra',
collection=collection)
extraImage = func.get_butler_image(repo_dir,instrument=instrument,
iterN=0, detector=f"{sensor}_SW0",
collection=collection)
# get the pixel scale from exposure to convert from pixels to arcsec to degrees
pixelScale = extraImage.getWcs().getPixelScale().asArcseconds()
configDir = getConfigDir()
instDir = os.path.join(configDir, "cwfs", "instData")
algoDir = os.path.join(configDir, "cwfs", "algo")
# inside wfEsti = WfEstimator(instDir, algoDir)
# this is part of the init
inst = Instrument()
algo = Algorithm(algoDir)
# inside estimateZernikes()
instName='lsst'
camType = getCamType(instName)
defocalDisInMm = getDefocalDisInMm(instName)
# inside wfEsti.config
opticalModel = 'offAxis'
sizeInPix = 160 # aka donutStamps
inst.configFromFile(sizeInPix, camType)
# choose the solver for the algorithm
solver = 'exp' # by default
debugLevel = 0 # 1 to 3
algo.config(solver, inst, debugLevel=debugLevel)
centroidFindType = CentroidFindType.RandomWalk
imgIntra = CompensableImage(centroidFindType=centroidFindType)
imgExtra = CompensableImage(centroidFindType=centroidFindType)
# select a donut pair in that corner
i=1
donutExtra = donutStampsExtra[i]
j=4
donutIntra = donutStampsIntra[j]
# Inside EstimateZernikesBase
# Transpose field XY because CompensableImages below are transposed
# so this gets the correct mask orientation in Algorithm.py
fieldXYExtra = donutExtra.calcFieldXY()[::-1]
fieldXYIntra = donutIntra.calcFieldXY()[::-1]
# same camera for both donuts
camera = donutExtra.getCamera()
detectorExtra = camera.get(donutExtra.detector_name)
detectorIntra = camera.get(donutIntra.detector_name)
# Rotate any sensors that are not lined up with the focal plane.
# Mostly just for the corner wavefront sensors. The negative sign
# creates the correct rotation based upon closed loop tests
# with R04 and R40 corner sensors.
eulerZExtra = -detectorExtra.getOrientation().getYaw().asDegrees()
eulerZIntra = -detectorIntra.getOrientation().getYaw().asDegrees()
# now inside `wfEsti.setImg` method,
# which inherits from `CompensableImage`
imgExtra.setImg(fieldXYExtra,
DefocalType.Extra,
image=rotate(donutExtra.stamp_im.getImage().getArray(), eulerZExtra).T)
imgIntra.setImg(fieldXYIntra,
DefocalType.Intra,
image=rotate(donutIntra.stamp_im.getImage().getArray(), eulerZIntra).T)
# rename to just like it is in Algorithm.py
algo, store = func.runIt_store(algo, imgIntra, imgExtra, model=opticalModel,
tol=1e-3)
fname = f'DM-35922_store_extra-{i}_intra-{j}.npy'
fpath = os.path.join('DM-35922',fname)
print(fpath)
np.save(fpath, store, )
DM-35922/DM-35922_store_extra-1_intra-4.npy
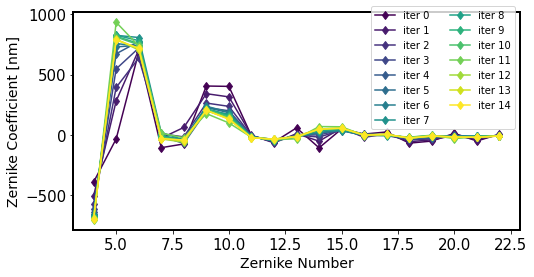
Illustrate the results. First plot the values of Zernikes from each iteration to show the algorithm progression:
[94]:
store = np.load(fpath, allow_pickle=True).item()
fig,ax = plt.subplots(1,1,figsize=(8,4))
nlines = len(store.keys())
color_idx = np.linspace(0, 1, nlines)
ax_legend_handles = []
cmap = plt.cm.viridis
for jj in store.keys():
color = cmap(color_idx[jj])
plt.plot(np.arange(4, 23),store[jj]['zer4UpNm'], '-d', label=f'iter {jj}',
color=color)
line = mlines.Line2D([], [], color=color, ls='-', marker='o', alpha=1,
)
ax_legend_handles.append(f'iter {jj} ')
plt.xlabel('Zernike Number', size=14)
plt.ylabel('Zernike Coefficient [nm]', size=14)
plt.legend( bbox_to_anchor=[1, 1.05], ncol=2)
[94]:
<matplotlib.legend.Legend at 0x7f60fa6e2e30>
[95]:
func.plot_algo_steps(store, iterNum=0)
intra 0
extra 1
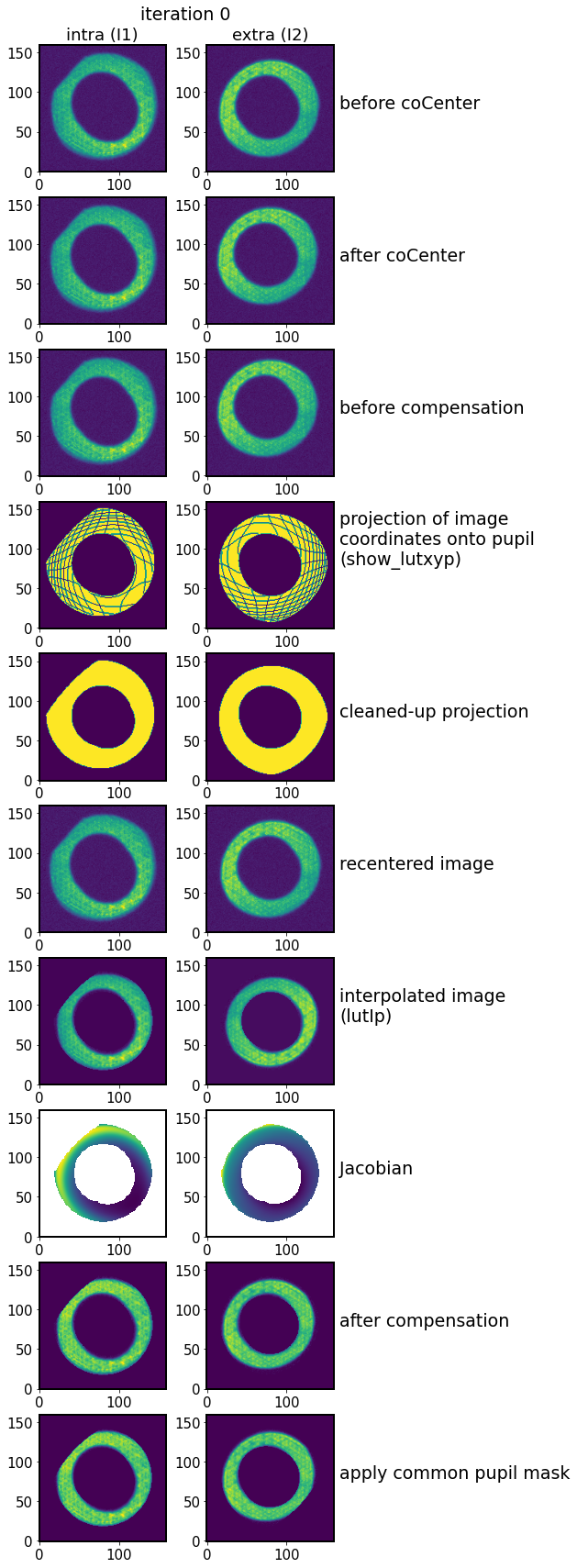
Thus each individual data product can be accessed and compared between individual iterations.